Multilayer elastomer actuator to support those with visual and hearing impairments
The tactile-feedback actuator is programmed to enable complex emotional interactions and dynamic command interactions.

Current surface, tactile-feedback devices operate through electrical stimulation or mechanical vibration.
Electrical stimulation works by directly stimulating nerves with an electric current, thereby transmitting signals to the brain. But this approach has several drawbacks, such as inconsistent user experiences, skin discomfort, and temporary sensory desensitisation.
In comparison, flexible mechanical actuators convey tactile information by inducing skin deformation. This enhances the user's freedom of interaction with the environment. However, these actuators commonly employ dielectric elastomers and piezoelectric materials, which require kilovolt-level high-voltage power supplies for actuation. This not only poses safety hazards but also restricts the capacity to edit multi-dimensional tactile feedback information.
Researchers at Tsinghua Shenzhen International Graduate School, China, have developed a flexible electret actuator based on multi-layer variable stiffness polydimethylsiloxane (PDMS) elastomers. The five-layer sandwich structure consisting of a PET encapsulation layer, an indium tin oxide upper electrode layer, a fluorinated ethylene propylene electret film layer, a gold electrode layer and a PDMS stiffness regulator layer.
By adjusting the parameters of the single-layer PDMS support layer, the strength and the frequency of the mechanical vibrations generated by the electret actuator could be effectively controlled to encode tactile information. In this study, the group introduced the concept of variable stiffness composites by selectively changing the crosslinking density of multi-layer PDMS elastomers.
By varying the cross-linking density, local stiffness can be customised to create 4D haptics that change depending on time, position, amplitude and frequency. These parameters can then relate emotional information – ‘passion’, ‘nervous’, ‘sadness’ and ‘relaxation’ – or other commands, such as help with navigation, through Braille characters.
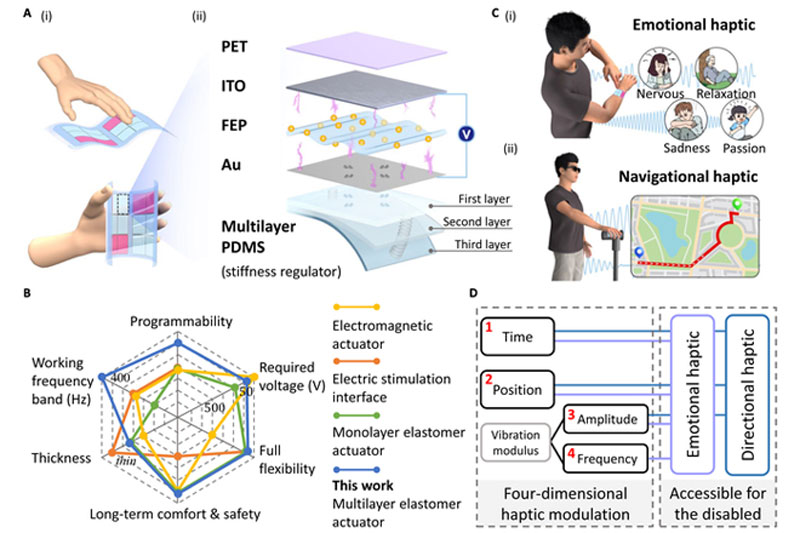
They claim the device is also driven by low voltages. The sensor showed it was capable of generating perceivable tactile feedback force at 5V drive voltage; a gain of 1.06mN/V at 200V drive voltage and 0.98mN/V at 35V drive voltage and a wide frequency range of 50-450Hz – covering the main frequency range sensitive to touch.
The paper, which is published as Open Access in the journal Research, shows an average accuracy rate of 64.6% in users without training and 95.8% once training was complete.