Battery-free robotic sensors use origami to change shape mid-air
Small robotic sensors that ‘snap’ into a folded position mid-air during descent have been developed at the University of Washington, USA.
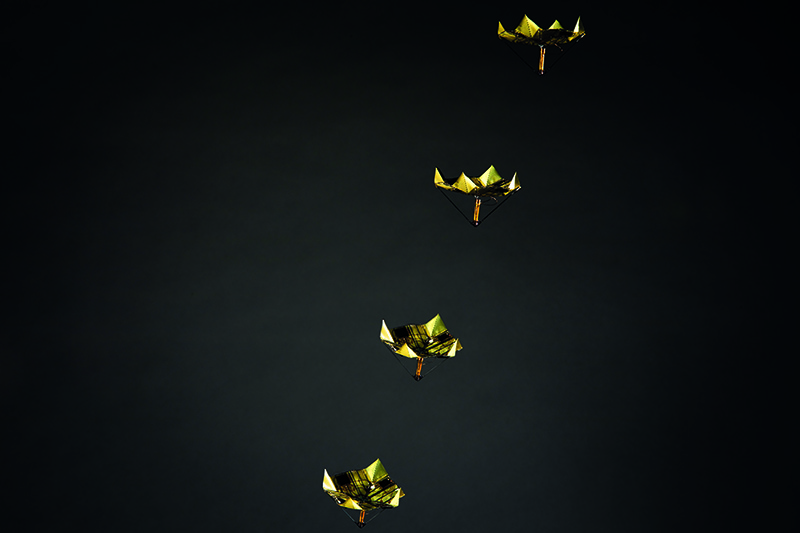
These ‘microfliers’ are dropped from a drone and use an origami fold to switch from tumbling and dispersing outwards to dropping straight to the ground. The team was inspired by the geometric patterns found in leaves to develop the ‘Miura-ori’ fold in the structures.
As well as capturing meteorological information, applications could include agriculture and climate change monitoring. They can also carry sensors to survey temperature, humidity and other conditions while soaring.
The researchers say they can control the timing of each device’s transition using an onboard pressure sensor that estimates altitude, an onboard timer, or via a Bluetooth signal.
Explaining the rationale behind its innovation, co-senior author Vikram Iyer says, “The idea of microfliers –battery-free sensing devices that can fly in the wind mimicking leaves and seeds but also control their descent – has been a longstanding vision in both the scientific community and popular culture.”
The microfliers weigh about 400mg and can travel a football field distance when dropped from 40m in a light breeze.
Iyer comments that the robots are made of thin sheets of polyimide – the same material used to make flexible circuit boards. 'This allows us to directly fold the circuit itself to create the origami. To make sure it maintains its rigidity to enable the bi-stability that allows it to snap between the two folded state, we also add a lightweight carbon fibre root structure similar to the veins of a leaf to maintain its rigidity as it falls.'
Each structure has an onboard battery-free actuator and a solar-power-harvesting circuit and controller to trigger the shape changes.
The devices are said to be stiff enough to avoid changing accidentally before the signal and transition between states rapidly – only 25ms – shape-changing without a power source.
Noting that the origami structures need 34mN to change states, Iyer highlights the possibility of tuning this to stiffen the material or making it easier to transition by changing the thickness or adding patterns of holes along the folds.
The actuator is reported as producing instantaneous forces of 250mN, which Iyer points out offers flexibility for creating designs that are robust to false transitions. They have conducted controlled tests indoors with a high-speed fan, as well as a series of drop experiments outdoors.
On dropping prototypes off a sixth-floor balcony at 22m height, 'we made the surprising and accidental discovery that the flat and folded origami shapes show dramatically different falling behaviours'.
The group has found that the onboard microcontroller can cold start in environments with light levels as low as 65W/m², similar to the amount of light on a very cloudy day.
Addressing the possibility of scaling up, Iyer says, 'Leaf-out origami is a part of a branch of folding techniques called rigid origami, which is scalable from the micro to the metre scale. This scalability allows for larger leaf-out structures to be designed without any change to the properties of the structure'.
While the microfliers can only transition in one direction – from tumbling to falling – the researchers say that future devices will be able to transition in both directions.
'These fliers open up a new design space of robotic, shape-changing fliers and creates a new aerial platform for wireless sensing,' adds Iyer.
For more information, check out a previous article on: novel soft robotics technologies





